客户简介
长安大学信息学院智能网联及自动驾驶技术研究团队长期深耕在智能网联及汽车自动驾驶技术相关领域,先后承担着多项国家重点研发计划、省部级重点项目。 信息学院积极融入秦创原创新驱动平台建设,车联网与智能汽车测试技术相关科研团队的多项科技成果以多样化模式实现转化落地。 近三年来,相关团队已完成科技转化合同金额超2000余万元。

培养学生解决智能路侧系统感知性能提质增效复杂工程问题的创新实践能力,培养“研究者+实践者”创新拔尖人才。
长安大学信息学院智能网联及自动驾驶技术研究团队长期深耕在智能网联及汽车自动驾驶技术相关领域,先后承担着多项国家重点研发计划、省部级重点项目。 信息学院积极融入秦创原创新驱动平台建设,车联网与智能汽车测试技术相关科研团队的多项科技成果以多样化模式实现转化落地。 近三年来,相关团队已完成科技转化合同金额超2000余万元。
面向国家级一流本科专业计算机科学与技术,立足智慧交通变革趋势,以培养学生解决智能路侧系统感知性能提质增效复杂工程问题的创新实践能力为导向, 该实验设计“知识学习—领域认知—算法验证—综合实践”逐层递进的实验教学过程,引导学生沉浸式完成智能路侧多传感器部署、多传感器融合交通目标感知算法设计与效能测试的学习, 达成重基础、达前沿、深实践、迎挑战的教学目标,为我国交通行业培养“研究者+实践者”创新拔尖人才。

学生通过学习该实验,能够掌握智能路侧多传感器融合交通目标感知领域的基础知识与技术前沿,提升系统调试分析能力和复杂工程问题解决能力, 使学生具备严谨的科学态度和创新创业的意志品质,形成良好的家国情怀与工程伦理观。
系统通过仿真技术对全天时、全天候的真实动态交通环境进行数字化还原,构建高逼真的复杂动态交通场景,提供基于数字孪生技术构建的路网、建筑物、树木等静态交通场景模型, 以及多种气象物理模型和交通流动力学模型。学生可以依据测试需求,通过选择测试路网、气象条件和交通流量,自行设计动态测试场景。

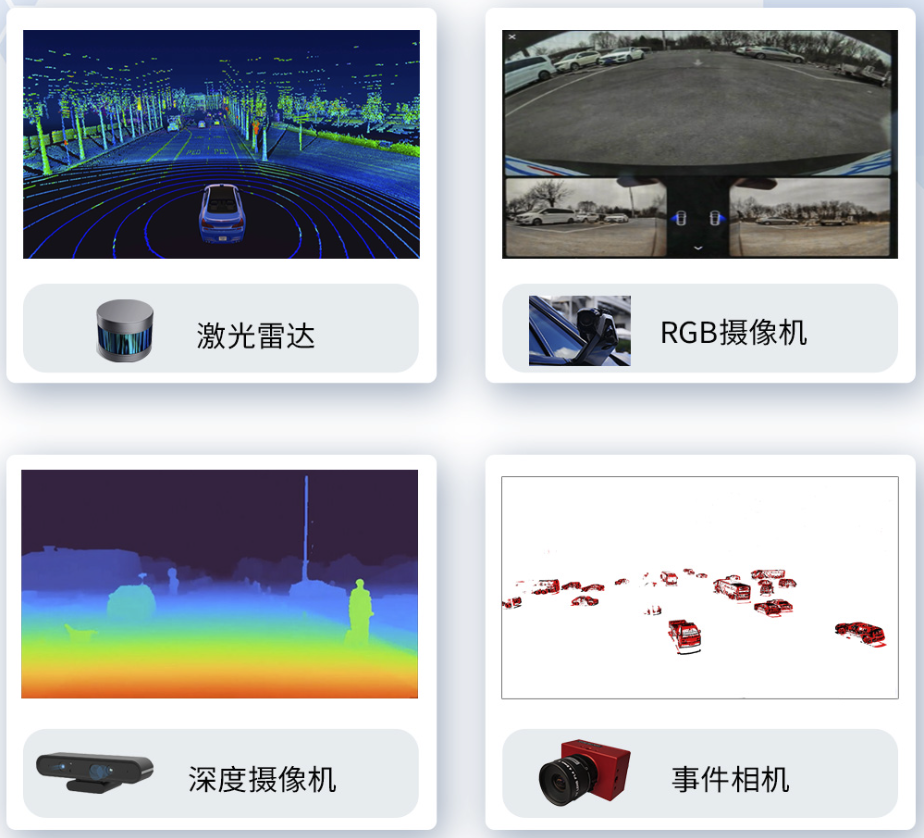
系统提供类型丰富的路侧立杆物理模型和高保真视觉传感器模型(RGB相机、激光雷达和事件相机),通过模拟光线投射特性对传感器的光学成像过程进行高精度还原,获得仿真图像、点云与事件信号。 学生可以通过设置路侧立杆的空间布局以及多传感器的内外参数,来调整多传感器的感知范围与信号生成。
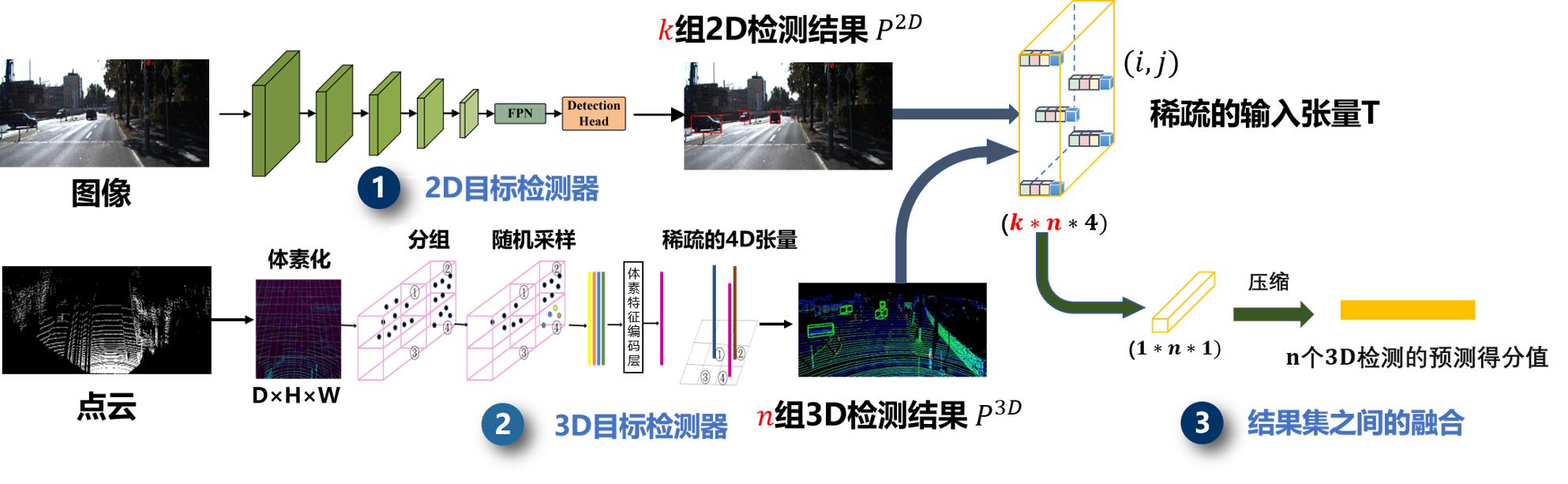
系统提供典型交通场景下多传感器融合感知算法的仿真测试过程,实时呈现智能路侧视域下交通目标感知结果,通过构建远距离小目标/近距离多目标仿真场景的测试样例, 对前、中、后多模态融合感知算法测试结果进行仿真验证与对比分析,增强学生的沉浸式学习体验,以及对路侧立杆智能化改造与感知提质增效过程的理解。
典型交通场景下,图像与点云融合交通目标感知算法在交通流密度、光照条件、天气条件、传感器选型等不同条件下,可得以下结论:
1)交通流密度:随着交通流量的增大,交通目标间的遮挡会逐渐加剧,这会导致交通目标检测召回率下降,并造成远距离目标和小目标的漏检。
2)光照条件:在不良光照条件下,相机输出图像对比度下降,并存在信息丢失,导致感知算法无法提取到完整表征,引起交通目标检测精度下降。
3)不良天气:在恶劣天气下,光线的传播过程受到影响导致成像质量下降,多传感器融合感知算法无法提取具有辨识力的特征,导致检测性能下降。
4)传感器类型:单模态条件下,相机能够输出丰富的颜色和纹理信息;雷达能够准确感知目标的空间分布信息。基于图像和点云的多模态融合方法能够同时利用颜色纹理信息和空间分布信息,因此能够取得高于单模态检测方法的精度。